

 联系我们
联系我们

工博士机器人技术有限公司作为智能工厂服务商,从智能制造解决方案的提供,到工业电气产品的一站式采购,从智能制造培训到专业维护保养,围绕设备的智能升级改造、生产加工、设备保障、技能培训等多个方面,实现生产的智能、环保和安全。 公司具备研发、工艺、单元产品、成套装备、自动化生产线、售后服务、质量控制等在内的自主核心技术,已形成工业机器人系统解决方案的完整产业价值链
主营ABB(ABB)、库卡KUKA、安川YASKAWA、发那科FANUC(fanuc)、欧地希OTC、川崎Kawasaki、遨博AUBO、大族、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生、EPSON等机器人项目集成、机器人周边:机器人管线包,机器人导轨,机器人夹爪、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区南翔镇众仁路399号B座20楼(19921272665)
主营ABB(ABB)、库卡KUKA、安川YASKAWA、发那科FANUC(fanuc)、欧地希OTC、川崎Kawasaki、遨博AUBO、大族、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生、EPSON等机器人项目集成、机器人周边:机器人管线包,机器人导轨,机器人夹爪、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区南翔镇众仁路399号B座20楼(19921272665)
--------------------------------------------------------------------------------------------------
遨博协作机器人打光的稳定性
工业视觉应用一般分成四大类:定位、测量、检测和识别,其中测量对光照的稳定性要求高,因为光照发生10-20%的变化,测量结果将可能偏差出1-2个像素,导致图像边缘位置发生变化,因此降低环境光的干扰,保证主动照明光源的发光稳定性,是首要解决的问题。 工件位置的不一致性
工件位置的不一致性
视觉检测应用中,首先要能找到待测目标物。待测目标物出现在拍摄范围内,尤其是目标物无序出现时,能检测目标物位置,就需要用到定位功能,解决测量结果有较大偏差的问题。
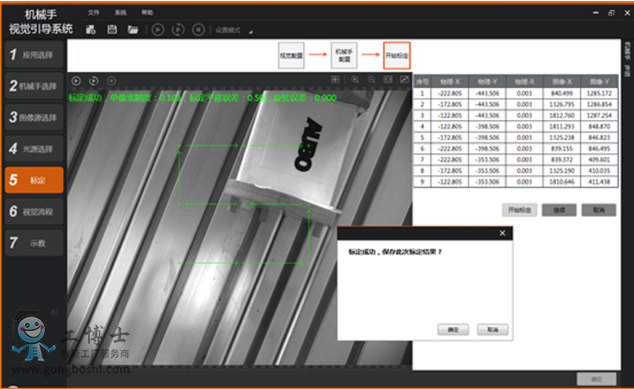
 遨博协作机器人标定
遨博协作机器人标定
高精度测量时会用到光学畸变标定、投影畸变的标定、物像空间的标定等,需要机器人标定起始位置、运动方向、运动步长,实现机器人自动运动到各个标定位置,获取数据计算标定结果。
 物体的运动速度
物体的运动速度
如果被测量的物体不是静止的,而是在运动状态,那么一定要考虑运动模糊对图像精度(模糊像素=物体运动速度相机曝光时间),这不是单一软件能够解决的。需要视觉与机械臂系统的共同协作。
 遨博协作机器人软件的测量精度
遨博协作机器人软件的测量精度
测量应用中软件能够从图像上提取的特征点较少,精度只能按照1/2—1/4个像素考虑,机器视觉的运动速度和测量精度在整个产品中占有重要的位置,运动速度快慢以检测能力是成反比的,因此提高运动精度和检测细节很重要。

遨博协作机器人打光的稳定性
工业视觉应用一般分成四大类:定位、测量、检测和识别,其中测量对光照的稳定性要求高,因为光照发生10-20%的变化,测量结果将可能偏差出1-2个像素,导致图像边缘位置发生变化,因此降低环境光的干扰,保证主动照明光源的发光稳定性,是首要解决的问题。
视觉检测应用中,首先要能找到待测目标物。待测目标物出现在拍摄范围内,尤其是目标物无序出现时,能检测目标物位置,就需要用到定位功能,解决测量结果有较大偏差的问题。
高精度测量时会用到光学畸变标定、投影畸变的标定、物像空间的标定等,需要机器人标定起始位置、运动方向、运动步长,实现机器人自动运动到各个标定位置,获取数据计算标定结果。
如果被测量的物体不是静止的,而是在运动状态,那么一定要考虑运动模糊对图像精度(模糊像素=物体运动速度相机曝光时间),这不是单一软件能够解决的。需要视觉与机械臂系统的共同协作。
测量应用中软件能够从图像上提取的特征点较少,精度只能按照1/2—1/4个像素考虑,机器视觉的运动速度和测量精度在整个产品中占有重要的位置,运动速度快慢以检测能力是成反比的,因此提高运动精度和检测细节很重要。
